Rational interpolation
I recently uncovered a hidden gem when it comes to literature on rational interpolation. It's this PhD thesis by someone named Antonio Cosmin Ionita titled Lagrange rational interpolation and its applications to approximation of large-scale dynamical systems. I've found that finding good resources on rational interpolation is really hard, so this is a great resource.
It turns out that interpolating a set of coordinates with a rational function gives a much better approximation than with a polynomial interpolation. Additionally, for some datasets, a unique rational interpolant exists. This is the case with polynomial interpolation, but it's surprising that this would extend to the rational case because rational polynomials are much more complex.
Background
The idea is that one has a dataset of the form \((x_i, f_i)\) with \(i = 0, 1, 2, \dots, N\), and you would like to interpolate the data with some rational function.
In the polynomial case, the way that you solve this is by using a family of functions known as the Lagrange Polynomials. Given a a set of data \((x_i, f_i)\), the Lagrange polynomials are the polynomials \begin{align} \ell_0(x) &= (x - x_1)(x - x_2)\cdots (x - x_N) = \prod_{i \ne 1}^{N}(x - x_i)\\ \ell_1(x) &= (x - x_0)(x - x_2)\cdots (x - x_N) = \prod_{i \ne 2}^{N}(x - x_i)\\ \vdots &= \vdots \\ \ell_N(x) &= (x - x_0)(x - x_1)\cdots (x - x_{N-1}) = \prod_{i \ne N}^{N}(x - x_i) \end{align} One then observes that the polynomial of degree \(N\) $$ p(x) = \sum_{i = 1}^{N} \frac{f_i}{\ell_i(x_i)}\cdot \ell_i(x) $$ interpolates the data. Note the linear algebra interpretation: \(\frac{f_i}{\ell_i(x_i)}\) can be regarded as the coefficient and \(\ell_i(x)\) as the basis vector.
For example, consider 20 points on \(y = \sin(x)\) equidistantly spaced on \([0, 2\pi]\). We can perform lagrange interpolation, and see how the interpolation behaves in the range \([-3, 2\pi + 3]\).
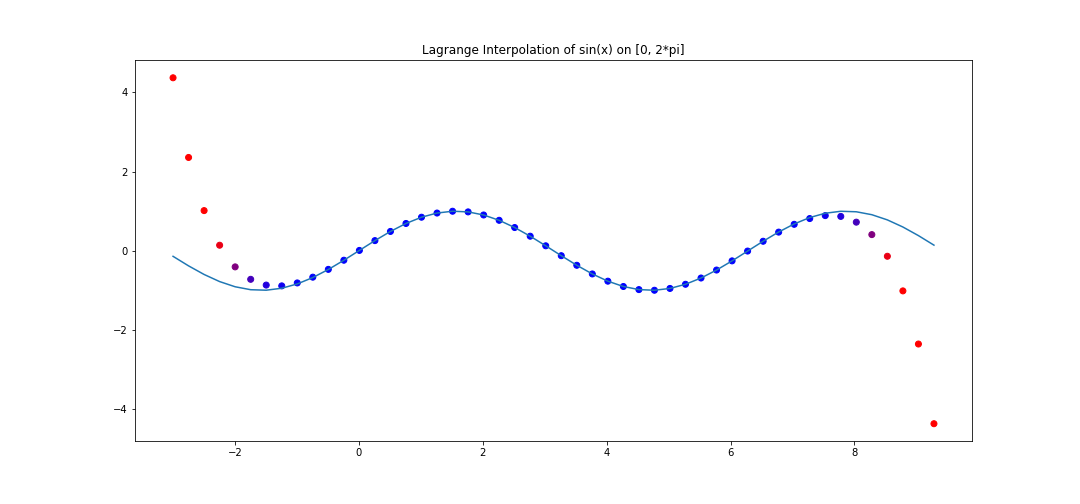
The polynomial interpolation does a good job on the assigned interval, but deviates very quickly outside.
In practice, it is easier to use the Barycentric form of the interpolation, since it requires less computational operations. It also turns out to be the right way to think about Lagrange interpolation.Before we introduce that form we need a small fact.
Lemma: Let \(\ell_i(x)\) be the \(i\)-th lagrange basis vector for a dataset \((x_i, f_i)\) for \(i = 0, 1, 2, \dots, N\). Then \(\(e(x) = \sum_{i = 0}^{N}\frac{1}{\ell_i(x_i)}\ell_i(x) = 1\)\)
Proof: Consider the polynomial \(q(x) = e(x) - 1\). Since \(e(x_i) = 1\), we see that each \(x_i\) is a root of \(q(x)\), and so \(q(x)\) has \(N + 1\) many distinct roots. However, \(q(x)\) is a polynmoial of degree at most \(N\). Therefore \(q(x) = 0\).
Using the above result, we can now write \begin{align} p(x) = \frac{p(x)}{e(x)} = \frac{\sum_{i = 0}^{N} \frac{f_i}{\ell_i(x_i)}\cdot \ell_i(x)}{\sum_{i = 0}^{N} \frac{1}{\ell_i(x_i)}\cdot \ell_i(x) } = \frac{\ell(x) \cdot \sum_{i = 0}^{N}\frac{f_i}{\ell_i(x_i)}\cdot \frac{1}{x - x_i}}{\ell(x) \cdot \sum_{i = 0}^{N}\frac{1}{\ell_i(x_i)}\cdot \frac{1}{x - x_i}}\ \end{align} where \(\ell(x) = \prod_{i = 0}^{N}(x - x_i)\). So to reiterate, we just used the fact that \(\ell_i(x) = \frac{1}{x - x_i}\ell(x)\) and then factored and cancelled out \(\ell(x)\) from the expression. This gives the Barycentric form of polynomial Lagrange interpolation: $$ p(x) = \frac{\sum_{i = 0}^{N}\dfrac{f_i}{\ell_i(x_i)} \dfrac{1}{x - x_i}}{\sum_{i = 0}^{N}\dfrac{1}{\ell_i(x_i)} \dfrac{1}{x - x_i}} $$ Note that we can't plug in \(x_i\), but that's okay because we already know the value should be \(f_i\). This can be easily coded into a program.
Code
To begin, we first need some imports. Unlike a lot of code tutorials that randomly import modules in the middle of program bodies (which is bad), we're going to import things once and for all right here. Note that we don't really need much for this.
import numpy as np
import matplotlib.pyplot as plt
from numpy.linalg import matrix_rank
from scipy.linalg import null_space
def alternating_partition(xy_data: list[tuple], left_arr_size: int=None) -> tuple:
"""Creates a disjoint partition of the xy_data, one parition being of size left_arr_size.
"""
lambda_data = [] # Left array x_data
w_data = [] # Left array y_data
mu_data = []
v_data = []
if left_arr_size is None:
left_arr_size = len(xy_data) // 2
elif (2*left_arr_size - 1) > len(xy_data):
raise ValueError(f"Cannot alternately select {left_arr_size} many points from xy_data")
for i, pt in enumerate(xy_data):
x, y = pt
if (i % 2) == 0 and left_arr_size > 0:
lambda_data.append(x)
w_data.append(y)
left_arr_size -= 1
else:
mu_data.append(x)
v_data.append(y)
return lambda_data, w_data, mu_data, v_data
def loewner_matrix(x_data: list, y_data: list) -> tuple:
"""Consider x_data = [x_1, x_2, ..., x_n] with y_data = [y_1, ..., y_n]
The function
1. Creates two disjoint partitions of x_data
[mu_1, ..., mu_{n_1}], [lambda_1, ..., lambda_{n_2}]
and corresponding disjoint partitions of y_data
[v_1, ..., v_{n_1}], [w_1, ..., w_{n_2}]
2. Calculates the Loewner matrix defined as
v_i - w_j
L_{ij} = ---------------
mu_i - lambda_j
3. Calculates the smaller Loewner matrix, based on rank(L_ij)
and returns the nullspace of this smaller matrix.
For more details, see Algorithm 1.1, P. 33 of [Cosmin-Ionita].
"""
assert len(x_data) == len(y_data), "input x and y data are mismatched"
# Patition the data
xy_data = list(zip(x_data, y_data))
lambda_data, w_data, mu_data, v_data = alternating_partition(xy_data)
n = len(mu_data)
m = len(lambda_data)
# Calculate the loewner matrix
L = np.zeros(n * m).reshape(n, m)
for i, v_i in enumerate(v_data):
for j, w_j in enumerate(w_data):
L[i][j] = (v_i - w_j) / (mu_data[i] - lambda_data[j])
# Calculate the smaller Loewner matrix, based on rank of L
rank = matrix_rank(L)
L_hat = np.zeros((n + m - (rank + 1)) * (rank + 1)).reshape(n + m - (rank + 1), rank + 1)
lambda_hat, w_hat, mu_hat, v_hat = alternating_partition(xy_data, left_arr_size=rank+1)
for i, v_i in enumerate(v_hat):
for j, w_j in enumerate(w_hat):
L_hat[i][j] = (v_i - w_j) / (mu_hat[i] - lambda_hat[j])
return null_space(L_hat), lambda_hat, w_hat
We now write the code for the rational interpolater. This is a function that returns a function, because Python is amazing and lets you do that. The function it returns is the rational interpolator.
def rational_interpolant(x_data: list, y_data: list) -> Callable:
"""Returns a rational function that interpolates the xy data."""
# Compute the loewner matrix, nullspace
nullspace, lambda_hat, w_hat = loewner_matrix(x_data, y_data)
nullspace_vec = nullspace[:,0].flatten()
assert len(lambda_hat) == len(w_hat) == len(nullspace_vec)
def interpolant(x):
if x in x_data:
return y_data[x_data.index(x)]
rank = len(lambda_hat)
numer = 0
denom = 0
for i in range(rank):
a_i = nullspace_vec[i]
w_i = w_hat[i]
lambda_i = lambda_hat[i]
numer += (a_i * w_i)/(x - lambda_i)
denom += a_i/(x - lambda_i)
return numer/denom
return interpolant
Finally, we need some code to usefully view our rational interpolation and the original function. We do this by coloring our points, which requires its own function. One thing we have to be careful with is that rational functions naturally have poles, so we need to tip toe around those coordinates. We do so with a try statement.
def generate_colors(y_1: list, y_2: list) -> list:
"""Given values y_1 which approximate values y_2, we return a list of RGB values
ranging from blue to orange to communicate approximation error
Blue indicates no error, orange indicates bad error."""
colors = []
thresh = 1 # Maximum y_1 - y_2 difference to use a fully orange color
for i in range(len(y_1)):
diff = abs(y_1[i] - y_2[i])
if diff > thresh:
scale = 0
else:
scale = abs(thresh - diff)/thresh
R = 255*(1 - scale)
G = 0
B = 255*scale
colors.append([R/255,G/255,B/255])
return colors
def plot_interpolater(x_test: list, interpolater: Callable, func: Callable, title: str="") -> tuple:
"""Test and plot the behavior of the interpolater and the function on x_test."""
y_test = []
x_test_defined = [] # We collect and leave out values that the function is not defined at
for x_val in x_test:
try:
y_val = interpolater(x_val)
except ZeroDivisionError:
pass
else:
x_test_defined.append(x_val)
y_test.append(y_val)
# Collect the function data for this test set of x values
y_data = [func(x_val) for x_val in x_test_defined]
# Now we plot the defined x_vals and the y_vals
fig, ax = plt.subplots(figsize=(15,7))
colors = generate_colors(y_test, y_data)
plt.title(title)
plt.plot(ax=ax)
ax.plot(x_test_defined, y_data)
ax.scatter(x_test_defined, y_test, c=colors)
return fig, ax
def interpolate_and_plot(x_data, func):
# Calculate true data
y_data = [f(val) for val in x_data]
# Compute the rational interpolant
rat = rational_interpolant(x_data, y_data)
plot_interpolater(x_data, rat, f)
Some runs
The first test that Cosmin-Ionita performs is an attempt to model points selected from the curve $$ f(x) = \frac{1}{1 + 100(x + 1/2)^2} + \frac{1}{1 + 100(x-1/2)^2}. $$ We can test rationally interpolating 100 points in the interval \([-1, 1]\):
x_data = list(np.linspace(-1, 1, 100))
def f(x):
return 1/(1 + 100*(x + 0.5)**2) + 1/(1 + 100(x - 0.5)**2)
interpolate_and_plot(x_data, f)
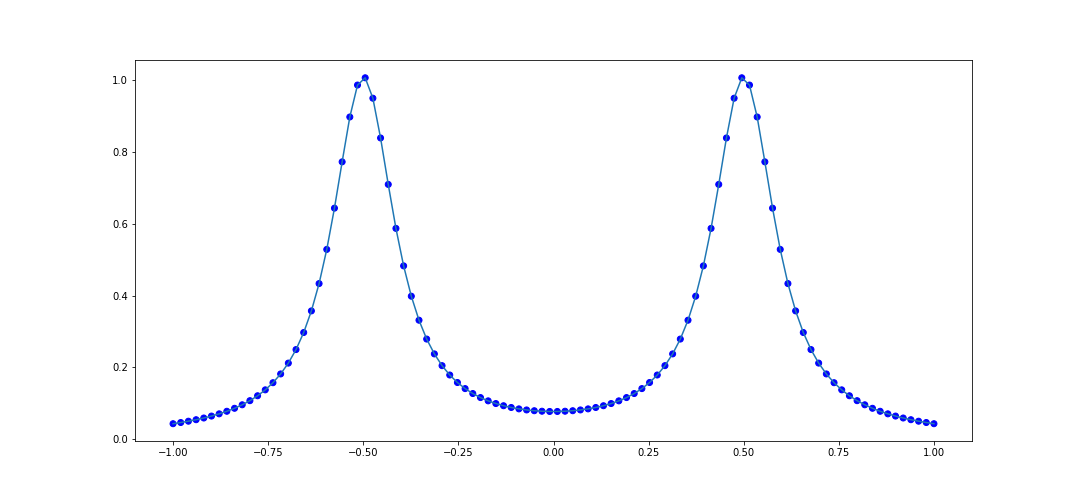
It looks pretty good. Let's try another rational function: $$ f(x) = \frac{4}{8x + 1} - \frac{2}{8x + 4} - \frac{1}{8x + 5} - \frac{1}{8x + 6} $$ The code to interpolate 100 points within \([-1, 1]\) is
x_data = [val for val in np.linspace(-1, 1, 100)]
def f(x):
return 4/(8*x + 1) - 2/(8*x + 4) - 1/(8*x + 5) - 1/(8*x + 6)
interpolate_and_plot(x_data, f)
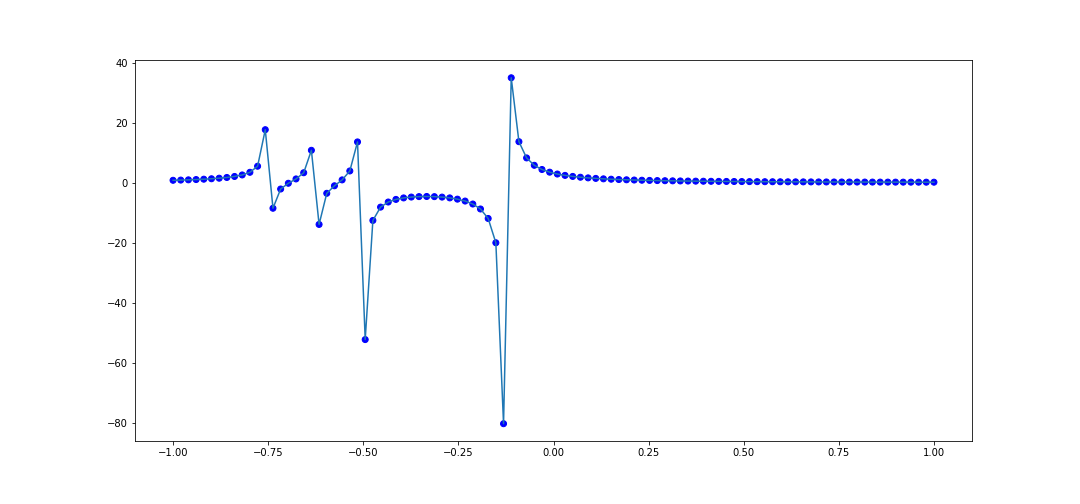
This also does pretty well, and it handles the numerous singularities nicely, as it captures the overall behavior near the poles.
Tests
Let's now see how the interpolation performs outside of the range of interpolation.
In our first example when we discussed interpolation via polynomials, we showed how it performed on \(f(x) = \sin(x)\) with 50 points sampled on \([0, 2\pi]\). Let's do the same thing with rational interpolation and see how it performs on \([-(2\pi + 5), 2\pi + 5]\). The code to do this is
x_data = list(np.linspace(0, 2*np.pi, 50))
y_data = [f(val) for val in x_data]
rat = rational_interpolant(x_data, y_data)
def f(x):
return np.sin(x)
x_test = list(np.linspace(-(2*np.pi + 5), 2*np.pi + 5, 100))
fig, ax = plot_interpolater(x_test, rat, f)
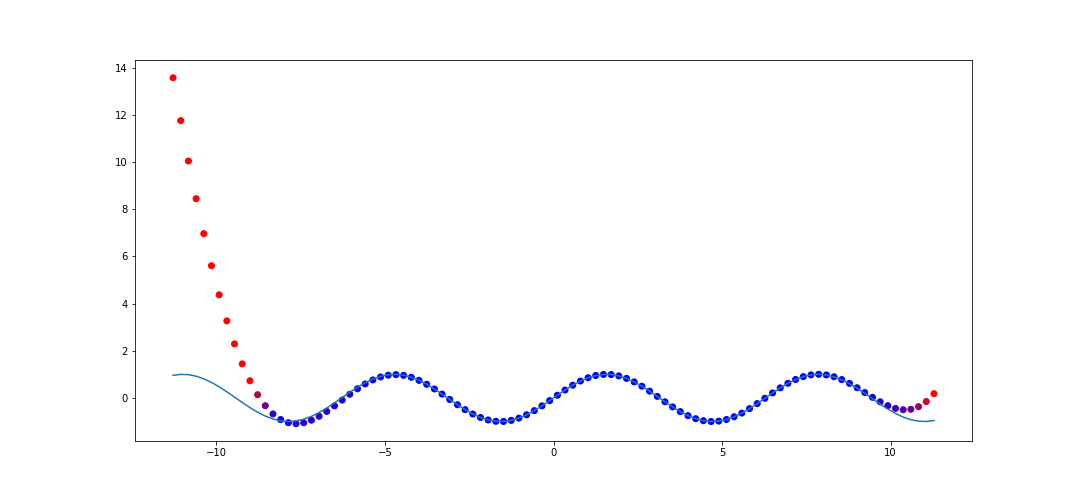
This is a huge improvement compared to polynomial interpolation. This captures a few periods outside of the original range.
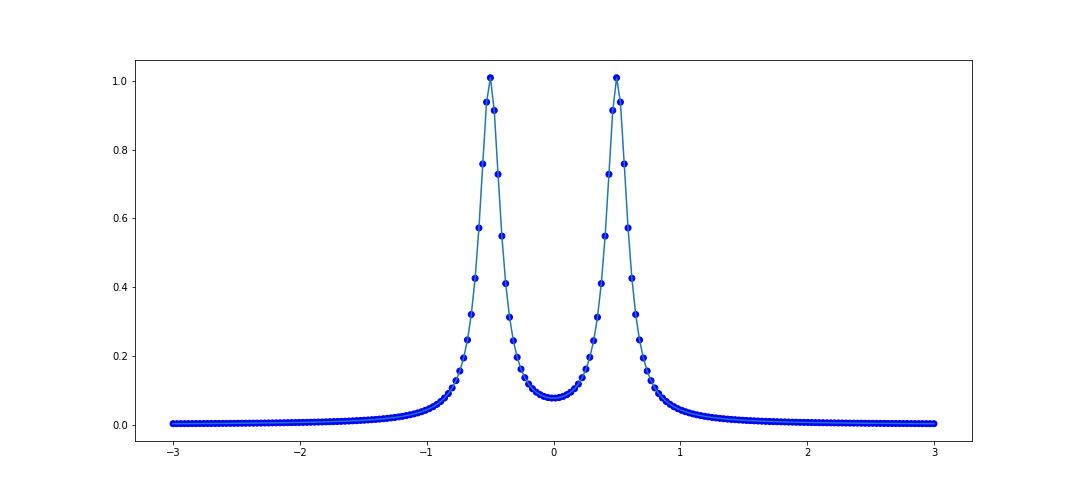
Let's try the rational function \(f(x) = \frac{1}{1 + 100(x + 1/2)^2} + \frac{1}{1 + 100(x-1/2)^2}.\) again and look at the performance on \([-3, 3]\). The code to do this is as follows.
x_data = list(np.linspace(-1, 1, 100))
def f(x):
return 1/(1 + 100*(x + 0.5)**2) + 1/(1 + 100*(x - 0.5)**2)
y_data = [f(val) for val in x_data]
rat = rational_interpolant(x_data, y_data)
# Test data
x_test = list(np.linspace(-3, 3, 200))
plot_interpolater(x_test, rat, f)
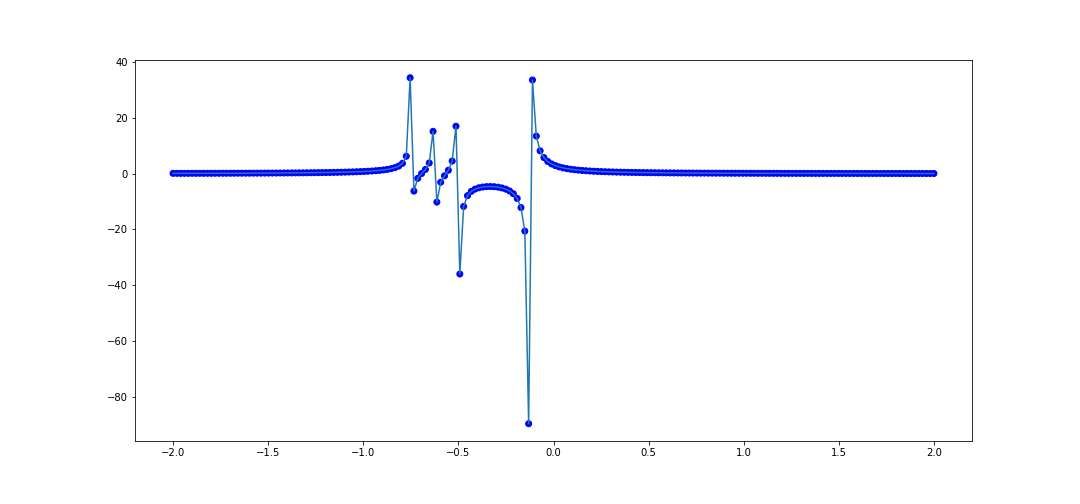
We can try this on the second example from before, similarly on [-3, 3]
x_data = [val for val in np.linspace(-1, 1, 100)]
def f(x):
return 4/(8*x + 1) - 2/(8*x + 4) - 1/(8*x + 5) - 1/(8*x + 6)
y_data = [f(val) for val in x_data]
# Test data
x_test = list(np.linspace(-3, 3, 200))
plot_interpolater(x_test, rat, f)
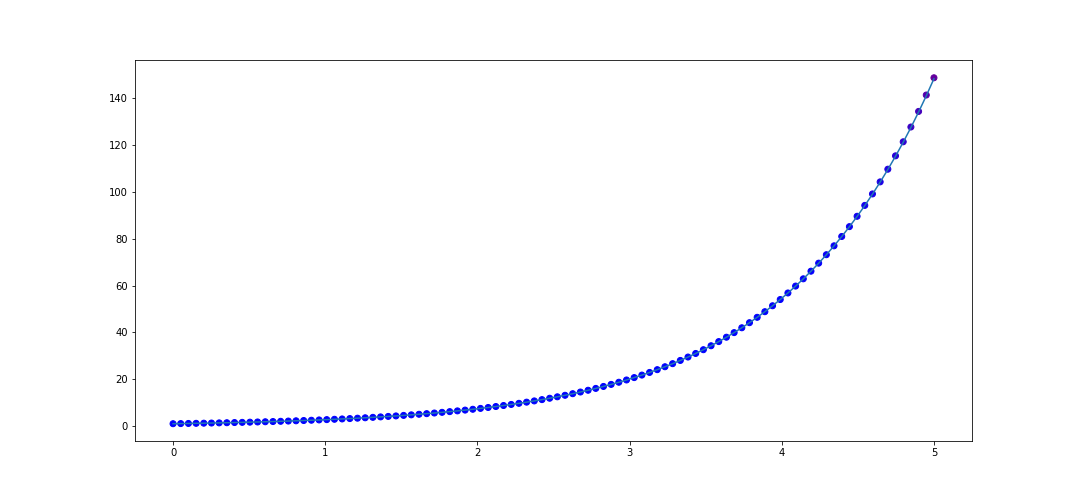
Now let's take a function which is not rational, \(f(x) = e^x\). Let's interpolate 20 points in \([0, 1]\). The code to do that is
x_data = list(np.linspace(0, 1, 20))
y_data = [f(val) for val in x_data]
rat = rational_interpolant(x_data, y_data)
def f(x):
return np.e**x
x_test = list(np.linspace(0, 5, 100))
plot_interpolater(x_test, rat, f)
Now what is interesting is if we interpolate more points in in \([0, 1]\), say 50 instead of 20, then we actually get worse performance on \([0, 5]\)! The code
x_data = list(np.linspace(0, 1, 50))
y_data = [f(val) for val in x_data]
rat = rational_interpolant(x_data, y_data)
def f(x):
return np.e**x
x_test = list(np.linspace(0, 5, 100))
plot_interpolater(x_test, rat, f)
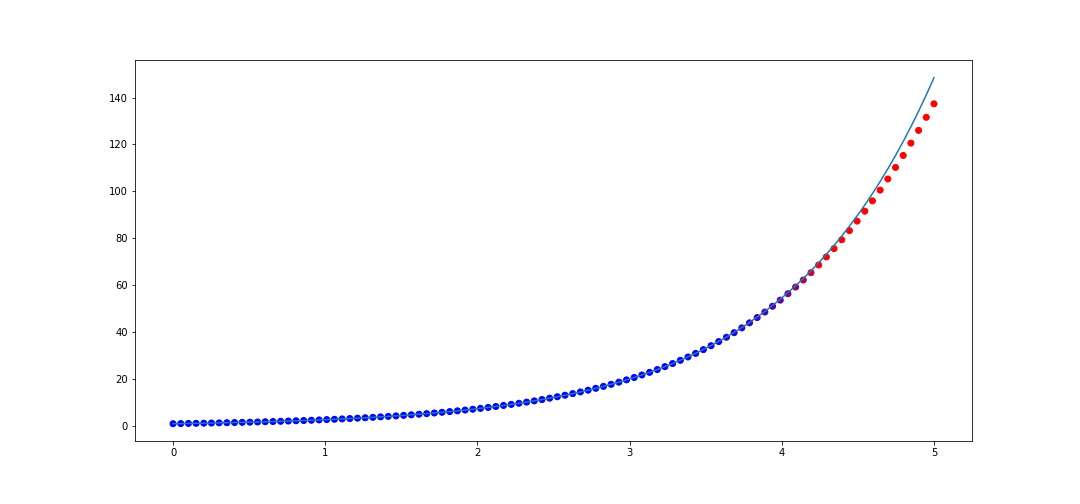 Thus rational interpolation is subject to overfitting fallacies just like any approximation model.
Thus rational interpolation is subject to overfitting fallacies just like any approximation model.